BC-i5000接收機(jī)功能
3.1 路徑測試
在測試管線路徑時(shí)�����,把接收機(jī)的屏幕保持向前����,先左右掃描管線可能埋設(shè)的地方���。找到管線的位置后再繼續(xù)向前走�����。主動(dòng)模式下���,接收機(jī)在管線上方時(shí),羅盤指示管線的前進(jìn)方向���。路徑測試時(shí)���,接收機(jī)需要始終和地面保持垂直��,在管線上方左右擺動(dòng)時(shí)也要如此�。不管采用何種工作模式來確定管線的方向�����,接收機(jī)最好都使用峰值箭頭模式��。仔細(xì)查找信號最大值�,再根據(jù)羅盤和左右箭頭確定管線的精確位置。
3.2 深度和信號電流測量
精確定位管線位置的步驟:①定位管線的兩邊����。②轉(zhuǎn)動(dòng)接收機(jī)確認(rèn)管線的方向。(在接收機(jī)橫向于管線的方向時(shí)�����,信號值最?���。"坜D(zhuǎn)動(dòng)接收機(jī)回到管線的正上方���。一旦確定了管線的正確位置�,把接收機(jī)順著管線的方向垂直放置在地面上�����,按動(dòng)按鍵“i”�����,管線的埋設(shè)深度和信號電流值顯示在屏幕上�。
3.3 示蹤探頭定位功能
示蹤探頭是一個(gè)發(fā)射線圈,發(fā)射信號的方式和管線上方的信號有所不同���。
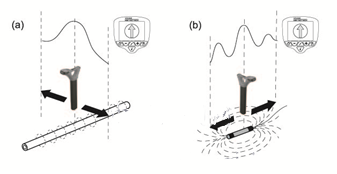
把接收機(jī)轉(zhuǎn)換到示蹤探頭模式���。由于示蹤探頭的結(jié)構(gòu),接收機(jī)順著示蹤探頭移動(dòng)時(shí)�,會(huì)發(fā)現(xiàn)示蹤探頭前后和上方,有三個(gè)峰值信號-次峰值-主峰值-次峰值��,示蹤探頭位于主峰值時(shí)的正下方����。當(dāng)接收機(jī)橫向于示蹤探頭時(shí)��,測試方法和管線相同��,深度測量也相同�。
3.4使用羅盤定位示蹤探頭
BC-i5000接收機(jī)開機(jī)���,選擇和示蹤探頭相同的頻率��,轉(zhuǎn)換到示蹤探頭模式����。把接收機(jī)靠近示蹤探頭的位置�����,按動(dòng)按鍵“+”增大增益�����,直到出現(xiàn)穩(wěn)定的信號強(qiáng)度條�����。如果信號強(qiáng)度條不穩(wěn)定�,說明接收機(jī)距離示蹤探頭有些遠(yuǎn)。轉(zhuǎn)動(dòng)接收機(jī)直到羅盤指向12點(diǎn)鐘的方向���。順著羅盤的方向前進(jìn)���,邊走邊轉(zhuǎn)動(dòng)接收機(jī)讓羅盤始終指向12點(diǎn)鐘的方向。羅盤會(huì)引導(dǎo)走一個(gè)弧線并橫向越過示蹤探頭����,如下圖-2所示,信號最大時(shí)接收機(jī)的下方就是示蹤探頭的位置����。
需要注意的是使用羅盤定位示蹤探頭需要有足夠的空間,如果示蹤探頭附近有障礙物(比如汽車��、墻等)可以采用下面的方法:把接收機(jī)放置在靠近示蹤探頭的位置����。移動(dòng)接收機(jī)使羅盤指向3點(diǎn)鐘的方向。此時(shí)若向一邊平行移動(dòng)接收機(jī)��,保持接收機(jī)的方向不變�,羅盤將會(huì)輕微轉(zhuǎn)動(dòng)�。保持接收機(jī)的方向不變����,向前移動(dòng)。羅盤將慢慢轉(zhuǎn)動(dòng)�,當(dāng)羅盤指向12點(diǎn)鐘的方向時(shí),繼續(xù)向前移動(dòng)����。此后要隨時(shí)轉(zhuǎn)動(dòng)接收機(jī),使羅盤始終指向12點(diǎn)鐘方向�。當(dāng)信號強(qiáng)度最大時(shí),接收機(jī)正好橫跨在示蹤探頭的正上方��。

BC-i5000電纜路徑探測系統(tǒng)在現(xiàn)場的應(yīng)用
4.1 管線掃描
通常在探測區(qū)域內(nèi)��,地下管線縱橫交錯(cuò)���,走向和埋深也各有不同�。接收機(jī)的水平線圈具有方向性�,所以應(yīng)以網(wǎng)格掃描方式對探測區(qū)域進(jìn)行掃描,以查找出所有管線����?���?上炔捎帽粍?dòng)定位法的電力模式和無線電模式進(jìn)行初步掃描�����,再使用主動(dòng)定位法的峰值箭頭模式進(jìn)行精確掃描�����。
4.2 管線跟蹤
連續(xù)跟蹤管線的走向�,擺動(dòng)接收機(jī)并沿管線方向前進(jìn)�,隨時(shí)觀察信號響應(yīng)。當(dāng)信號衰減出現(xiàn)突變時(shí)�,可采用圓周搜索方法查找最大信號:以信號消失點(diǎn)或信號衰減點(diǎn)為圓心,以1-2m為半徑���,劃圓搜尋目標(biāo)管線的信號����?�?赡艹霈F(xiàn)的搜索結(jié)果有:管線方向發(fā)生變化,出現(xiàn)分支管線���、管線終點(diǎn)���、變深點(diǎn)、管材變化點(diǎn)����、存在不相連的交叉管線、管線的套管��、地表存在鋼筋網(wǎng)���、空中電磁場干擾等�?�?刹捎谜{(diào)高增益并提高接收機(jī)高度��,測量并比較各個(gè)方向的信號強(qiáng)度��、埋深和電流強(qiáng)度���,并觀察彩色羅盤和導(dǎo)向指針的指示方向�,鑒別信號突變的原因。
4.3 精確定位管線的位置
精確定位應(yīng)采用峰值箭頭模式或峰值模式�,根據(jù)數(shù)字信號的最大值來精確定位管線位置。定位過程中�����,接收機(jī)表頭朝著管線前進(jìn)方向���,一邊行進(jìn),一邊垂直于地面左右移動(dòng)接收機(jī)��。定位過程中保持接收機(jī)與地面垂直��,沿著地面平移而不是擺動(dòng)接收機(jī)���。移動(dòng)距離應(yīng)保持一定幅度�,至少應(yīng)能夠觀察小→大→小的信號變化過程����,確認(rèn)管線信號,一般移動(dòng)距離宜保持在管線左右各0.5m�����。采用峰值定位模式對管線的走向進(jìn)行確認(rèn)。先確定峰值點(diǎn)的位置��,然后在峰值點(diǎn)原地旋轉(zhuǎn)接收機(jī)180度����,注意觀察信號的變化,信號會(huì)大幅變化甚至消失���。 在旋轉(zhuǎn)過程中����,注意觀察并確定信號具有最大峰值時(shí)接收機(jī)的朝向�����,此時(shí)接收機(jī)表頭朝向即為地下管線的走向���。也可利用彩色羅盤和導(dǎo)向指針來確定管線走向��。找到峰值后�����,原地轉(zhuǎn)動(dòng)接收機(jī)找出目標(biāo)管線的走向�,接收機(jī)垂直于管線走向移動(dòng),再次定位出峰值點(diǎn)����,即管線的精確位置
作者:郭若冰
來源:《電力設(shè)備》
免責(zé)聲明: 本文僅代表作者個(gè)人觀點(diǎn)�����,與 綠色節(jié)能環(huán)保網(wǎng) 無關(guān)����。其原創(chuàng)性以及文中陳述文字和內(nèi)容未經(jīng)本站證實(shí), 對本文以及其中全部或者部分內(nèi)容���、文字的真實(shí)性、完整性����、及時(shí)性本站不作任何保證或承諾,請讀者僅 作參考�����,并請自行核實(shí)相關(guān)內(nèi)容����。